CoReLIN - Constraint-based reasoning for lifelong interactive navigation
CoReLIN - Constraint-based reasoning for lifelong interactive navigation
Abstract
Robot navigation typically assumes an obstacle-free path exists between start and goal. In real environments, however, clutter may block all routes. We introduce Lifelong Interactive Navigation, where a mobile robot with manipulation capabilities must move objects to forge paths and complete sequential object-placement tasks. Because environment modifications persist, decisions impact future navigability and task difficulty. We propose CoReLIN, an LLM-driven constraint- based reasoning framework with active perception. CoReLIN reasons over a structured scene graph to decide which objects to relocate, where to place them, and where to explore next. A standard motion planner ex- ecutes reliable navigation and manipulation primitives. To evaluate long- horizon behavior, we introduce 2 new metrics - Long-term Efficiency Score (LES), a unified metric capturing success, execution efficiency, environment optimality, captured by Price of Clutter. In ProcTHOR- 10k, CoReLIN outperforms best baseline by 16% under standard metrics and LES, and transfers to real-world hardware.
Overview
Overview of our constraint-based planning framework for interactive navigation. At each timestep, our agent receives observations from the environment, which are utilized by our perception module to update the scene graph. Our scene graph contains the observed objects of the environment as nodes and the blocking relation among them as edges. Each node has its own attributes, which provide additional navigability and manipulability context to the LLM. The LLM then decides whether to explore the environment further to collect additional information or to attempt to complete the given task based on the scene graph content and the environment constraints.
Results
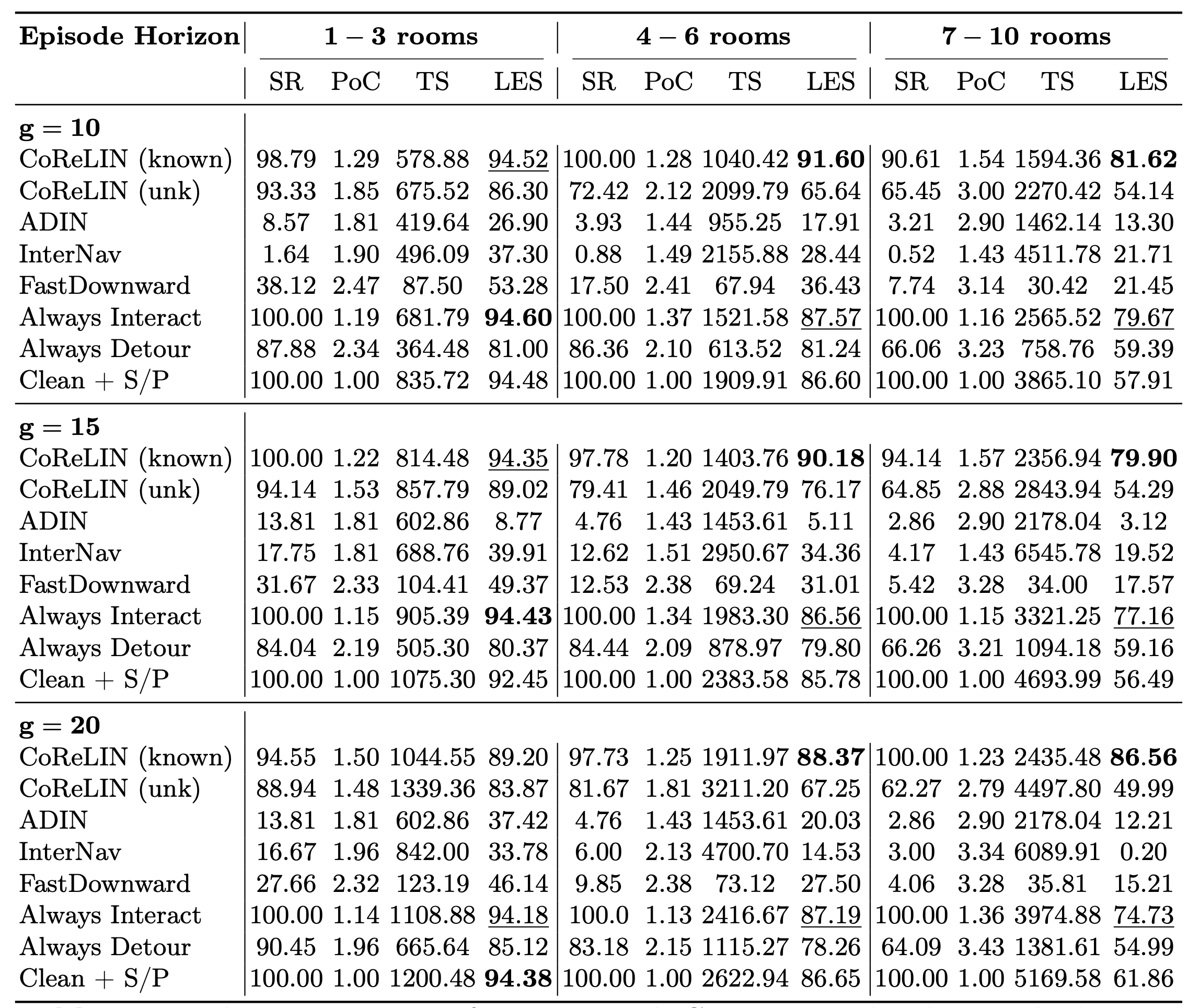
Baseline comparison of our approach CoReLIN with other methods across different floorplans (rooms 1 through 10) and varying episode horizons g={10,15,20} (where g is the total number of tasks per episode). Bold indicates best performing method and underline indicates second-best performing approach.
Cite
@inproceedings{vashisth2026corelin,
title = {{CoReLIN}: Constraint-based Reasoning for Zero-shot Lifelong Interactive Navigation},
author = {Vashisth, Apoorva and
Kulshrestha, Manav and
Bakshi, Pranav and
Conover, Damon and
Sartoretti, Guillaume and
Bera, Aniket},
booktitle = {European Conference on Computer Vision},
year = {2026}
}